Table of contents
- 1. Introduction
- 2. Main results
- 2.1. Task 1 Main Results
- 2.2. Task 2 main results
- 2.3. Task 3 main results
- 2.4. Task 4 main results
- 3. Publications
TOC
- 1. Introduction
- 2. Main results
- 2.1. Task 1 Main Results
- 2.2. Task 2 main results
- 2.3. Task 3 main results
- 2.4. Task 4 main results
- 3. Publications
Other pages:
Introduction
![]()
![]()
![]()
![]()
The IST is the leader of the consortium IST (IPFN and ISR), CIEMAT and ASTRIUM EADS, which won the first F4E grant of Remote Handling: activities related to the development of an Air Transfer System prototype and Cask Transfer System Virtual Mockup.

The grant F4E-2008-GRT-016 (MS-RH), covering activities related to the development of an Air Transfer System Prototype and Cask Transfer System Virtual Mock-Up, is organized in four tasks. This document is the final report of the grant.
The activities were carried out by experts of Instituto Superior Técnico (IST), of Centro de investigaciones Energéticas, Mediambientales Y Tecnológicas (CIEMAT) and of ASTRIUM EADS under the coordination of IST. The work was organized in four tasks with a total duration of 16 months, from March 2009 to June 2010. The work included 11 milestones, 4 technical deliverables (documents and software) and 4 management deliverables.
The main goals of the grant were:
- Definition of optimized trajectories along which the ATS/TCS will move in all nominal operations between TB and HCB,
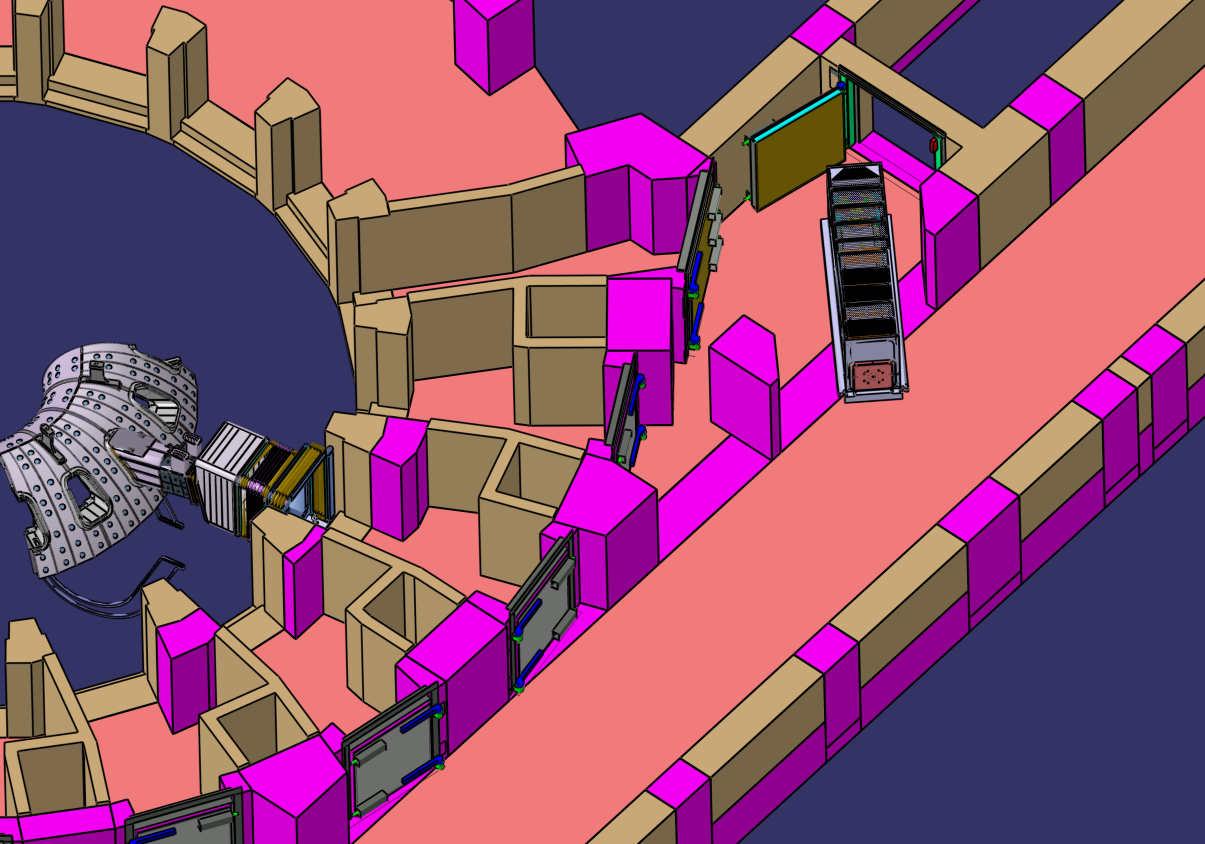
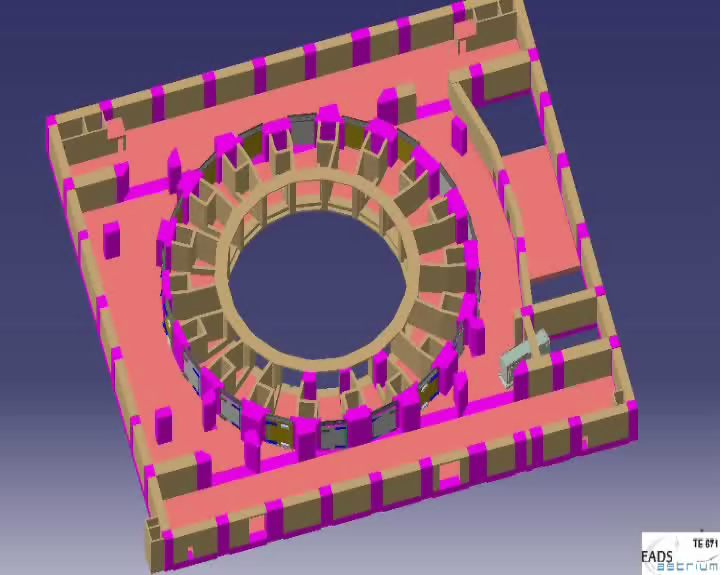
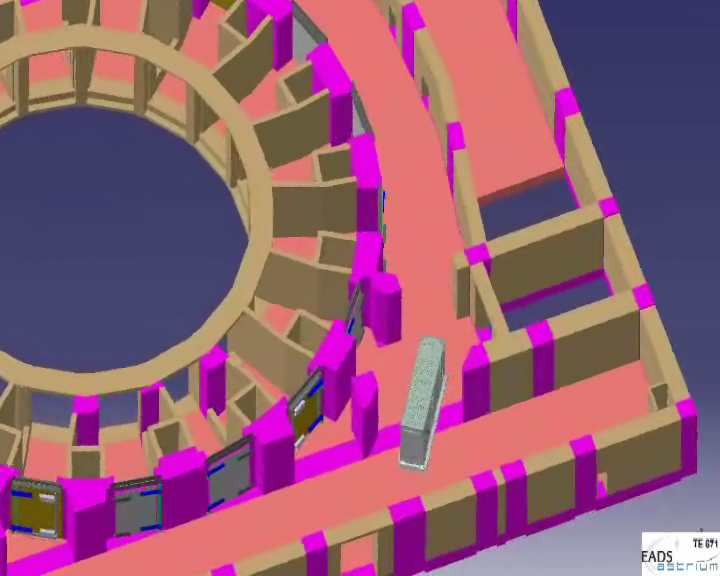
- Definition, development and operation of a 3D Virtual Model,
- Specificationof a real Test Facility for the TCS/ATS,
- Technical support to F4E on TCS/ATS related issues.
During the lifetime of this work different building CAD models and ATS/TCS dimensions and specifications were provided by F4E, taking into consideration the availability of the most updated information.
The main results are the following:
·There are trajectories for nominal operations of transportation between all the VV port cells in TB and the HCB. A total of 63 of optimized trajectories for the TCS were calculated.
·A set of scenario modifications (door profiles modifications) in the TB was proposed to guarantee safety in all trajectories.
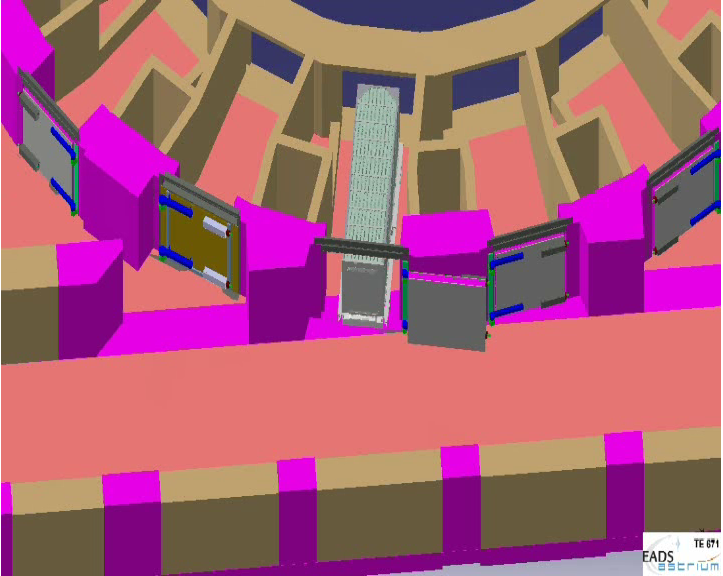
·A 3D VR model of the building and TCS with an HMI was developed for serving the TCS and ACS prototyping engineering activities and to evaluate the advantages of viewing system through simulated cameras.
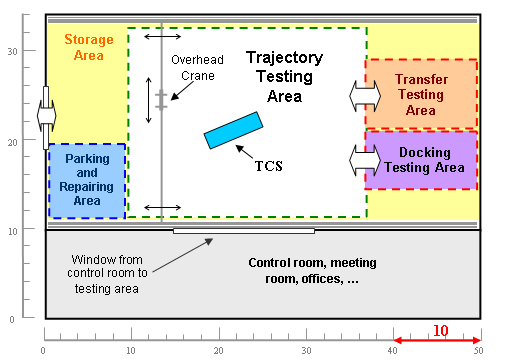
·The specification of a suitable Test Facility of 1200m2 was reported and a CAD model was proposed.
·Technical and consultancy support to F4E for ATS/TCS design. The TCS/ATS dimensions, TCS docking procedures, interfaces between the three components of the TCS, surveys on air-cushion and navigation systems were the main addressed topics.
Proposal to change to the last technologies of free-roaming navigation to support TCS motion along optimal trajectories in spite of buried wire systems, as proposed in the past. Mixed solutions could be considered.
To achieve these goals, grant F4E-2008-GRT-016 (MS-RH) was organized in four tasks:
•Task 1 – Definition of optimized TCs paths between all vessel ports on all levels and the hot cell ports
•Task 2 – Definition, development and operation of a comprehensive Virtual Model of the ITER buildings, ATS and TCS
•Task 3 – Definition of a test facility for ATS prototyping testing
•Task 4 – Technical support in the task areas A and B
Main results
In general terms, this grant proved that the TCS can accomplish all the nominal transport operations for maintenance between the TB and the HCB, using a smooth trajectory and assuming a safety margin to closest obstacles this requiring only small modifications in the scenario. A VR and HMI provided the tools to improve the trajectories and to draw conclusions on the viewing systems, both in the building and in the TCS, to support TCS/ATS navigation. The experience gained with the 2D trajectory evaluation and the 3D VR model supported the definition of the specifications of a Test Facility to experiment in a real scale all the relevant RH operations of TCS and ATS. This grant also provided technical and on-demand support to F4E on ATS, palette and casks design systems.
Task 1 Main Results
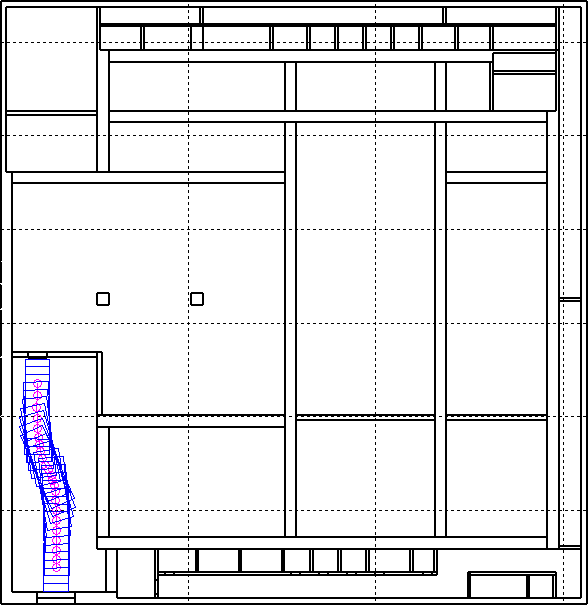
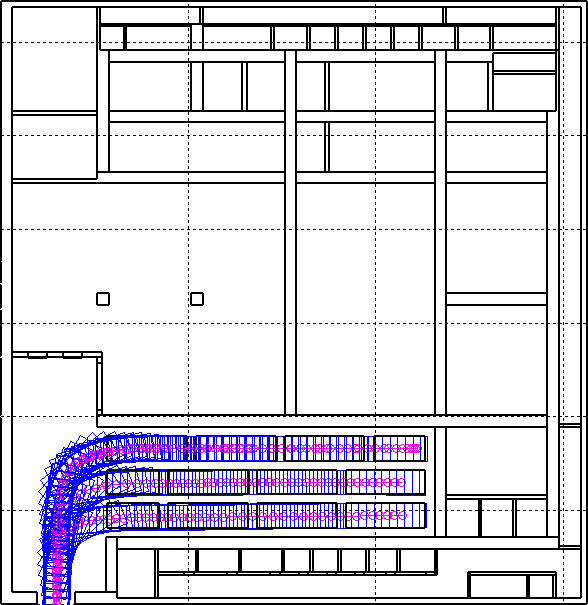
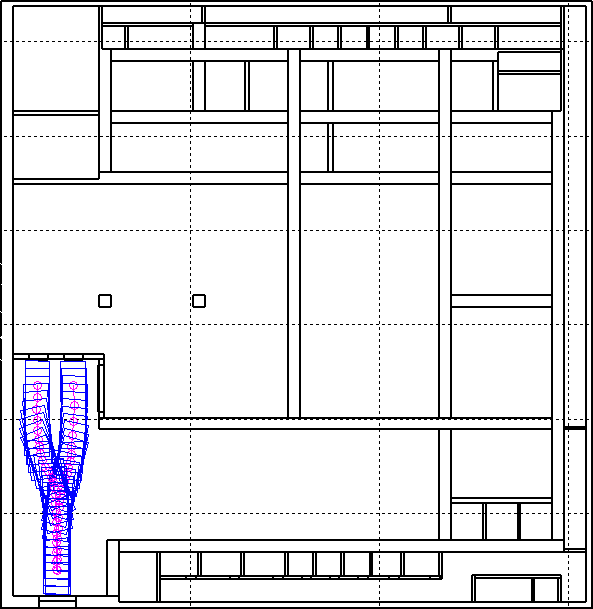
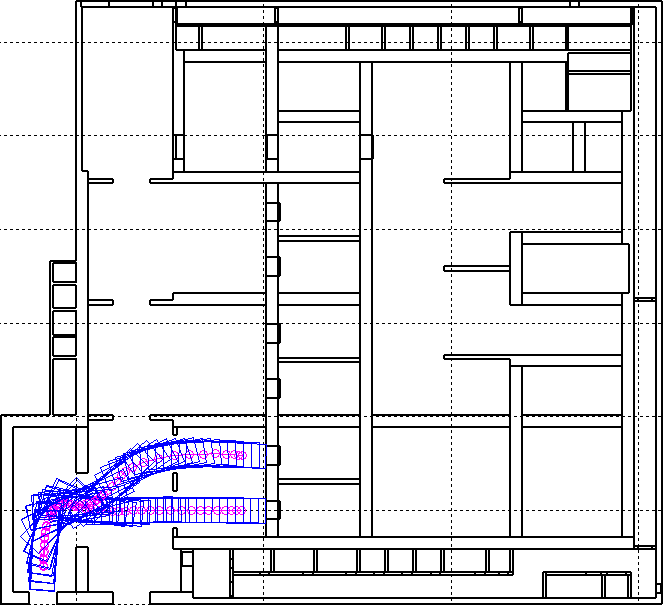
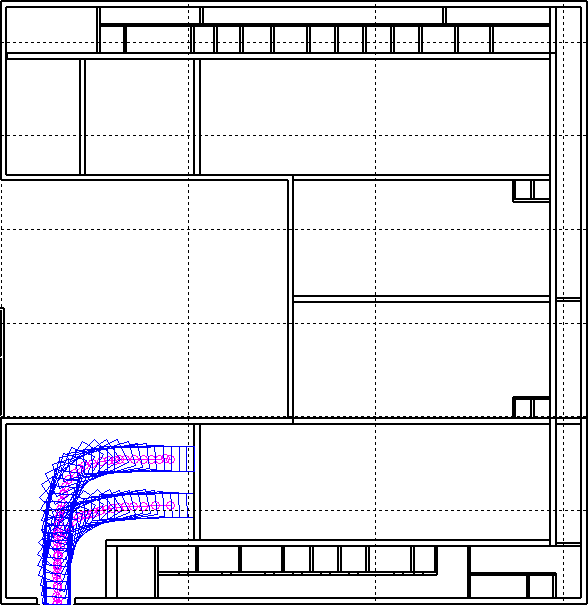
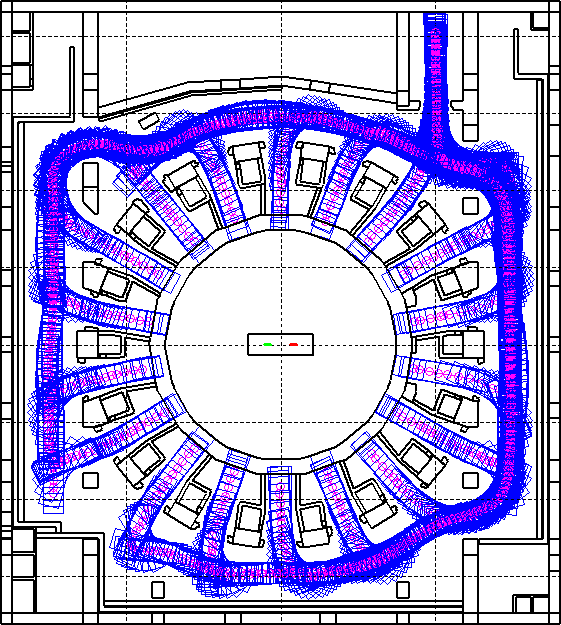
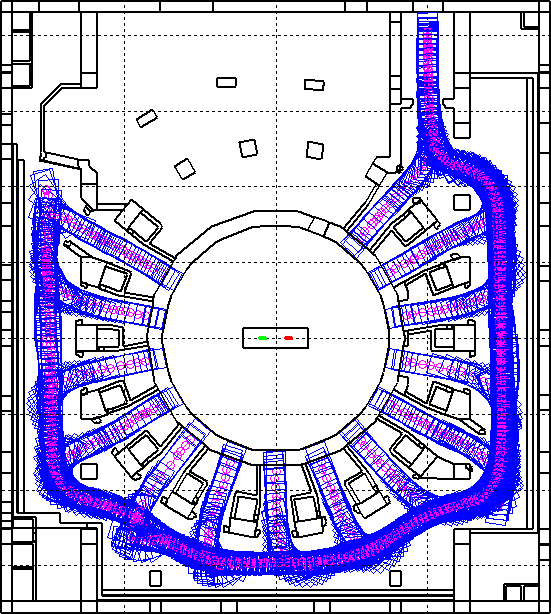
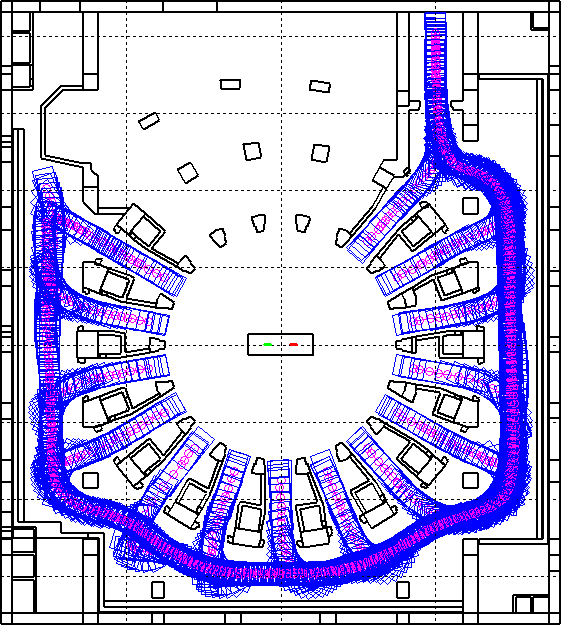
·Development and implementation of a 2D motion planning methodology yielding smooth trajectories for the TCS and ATS that maximize the clearance to the closest obstacles and that incorporate maneuvers whenever necessary. Smoothness of the trajectories is an important issue given the characteristics of the loads inside the cask envelope. The developed algorithm provides smooth trajectories guaranteeing non-discontinuities in the path curvature, i.e., trajectories are not sequences of line segments nor combinations of lines and arcs. The work was done assuming that both wheels of the ATS follow the same path.
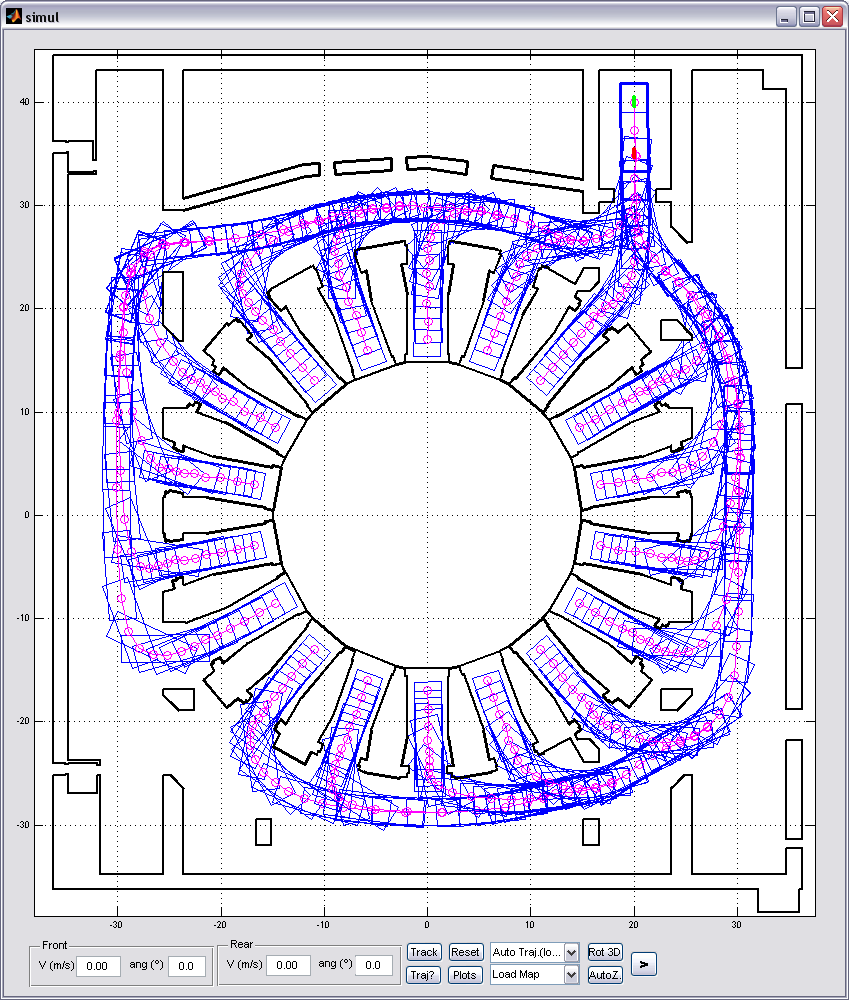
·Trajectory Evaluator and Simulator (TES) was developed under MATLAB environment, able to receive CAD models of the scenario and return the optimized trajectories for nominal operations of ATS/TCS. This simulator has additional features, as animation of ATS/TCS following the optimized trajectories, load, edit and save scenario models and trajectories, import/export trajectories in different formats. The TES was provided in a EXE installation package.
·A total of 63 trajectories were evaluated: 46 trajectories in TB (28 without manoeuvres and 18 with at least a manoeuvre), and 19 trajectories in HCB with a total length of approximately 4.5 km. For each trajectory, the distance to the closest obstacle along the TCS motion is evaluated together with a proposal of the TCS velocity profile along the path. The TCS velocity is proposed to be proportional to the distance to the nearest obstacle with a maximum speed of 20 cm/s when the minimum distance is above 1 meter.
·Statistical results on the set of trajectories, with emphasis on their length and time duration were computed.
·Proposal for door changes in all levels of TB with a 1.5m reservation area for cable routing, aiming at having safe trajectories, i.e., trajectories where the distance to the closest obstacle is greater than 300mm. Changes include: opening direction, aperture angle, location and length. Given the dimensions of the TCS, most door changes determine increasing the aperture angle and the length. This last is obtained by pulling the door outwards the VV center.
·Extension of VV ports 8 and 17 in level L1 of the TB were proposed and included in all studies where this modification becomes relevant.
·Optimized trajectories were calculated for the TCS with dimensions 8500mm x 2620mm x 3620mm (as described in Section 3) in all levels of TB and HCB for nominal operations, parking, docking and maneuvers according to the proposed door modifications. More than 94% of the trajectories have a safety margin above 0.5m. Exceptions are:
oVV port 14 in levels B1, L1 and L2 where no safe trajectory was found, even though the distance to the closest obstacle is close to the 300mm threshold; an optimal trajectory with a smaller clearance was generated;
oVV port 5 in level B1, where the safe trajectory is obtained with a narrower TCS, 8500mm x 2000mm x 3620mm;
·VV port 4 in level B1, where the safe trajectory is obtained with a shorter TCS, 7500mm x 2620mm x 3620mm.
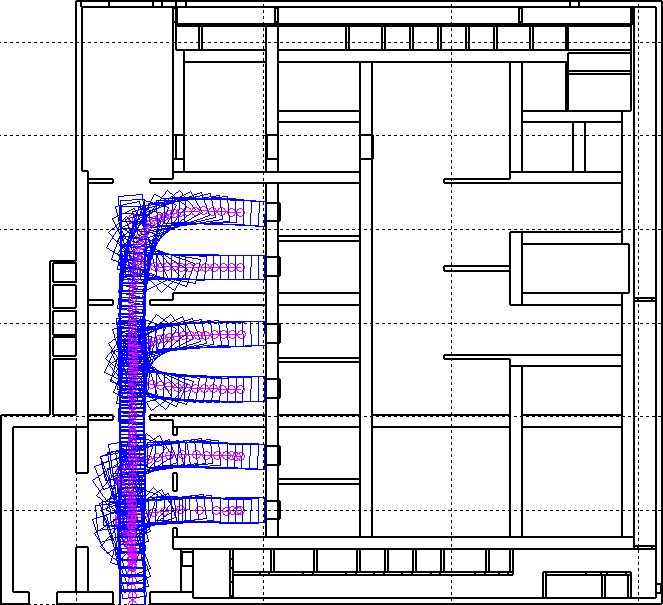
·Optimal trajectories from the HCB entrance to all docking points of HCB (for the HCB model available at June 2009). All trajectories in HCB are safe assuming a minimum distance to the obstacles of 300 mm.
·The complexity of the trajectories, the non-flexible nature of having them defined at floor level with a buried wire and the actual progress in free roaming navigation, point towards the use of this last technology (free-roaming navigation) to support TCS motion along optimal paths stored in a computer.
·Based on the F4E and IO instructions some elements on the scenario (e.g., air coolers and vacuum system boxes) were not considered in the trajectory optimization, but they may have impact in the trajectories results.
·No free area for parking places was found in the TB.
·Identification of 16 parking places at HCB, even though there is no space to park all 21 casks and that logistic studies are required.
·Identification of a set of open issues that require further studies.
Task 2 main results
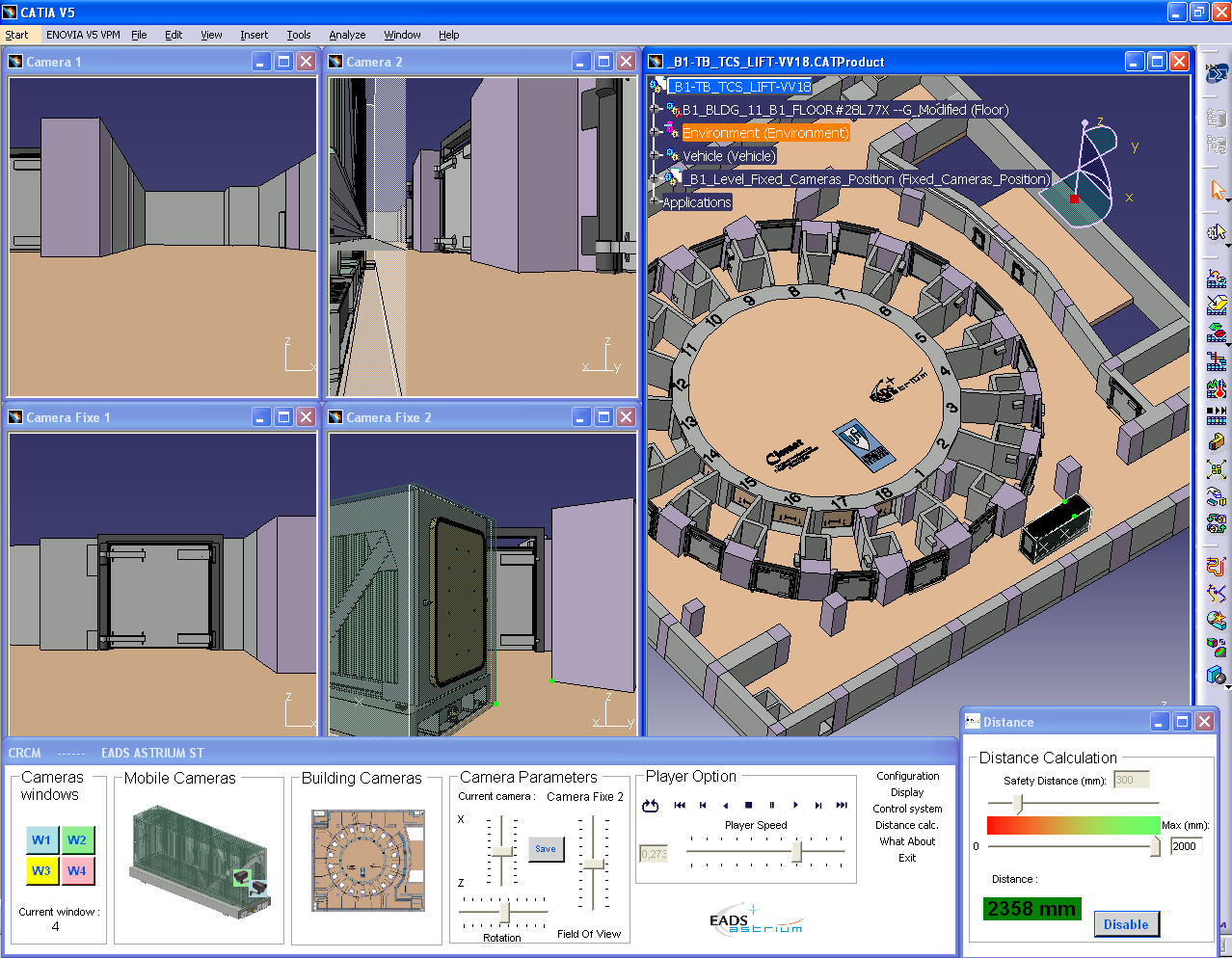
- A 3D VR model and a simulation capability for serving the TCS and ACS prototyping engineering activities, especially by testing path trajectories.
- A tool to explore the viewing system (both in the environment and in the TCS) through simulated cameras.
- The HMI to provide the user functionalities for choosing the driving mode, the relevant configuration parameter (number of cameras, angle of view, orientation, etc) and display useful information during TCS motion.
- Collision free trajectories for all the ports in the TB and the HCB were obtained and tested. The mutual feedback between Task 1 (where trajectories are obtained in a static 2D environment) and Task 2 (where the scenario is 3D and dynamic is present) was extremely important to achieve the final results. This feedback should exist in the future use of the software provided by IST and by ASTRIUM.
·Based on the set of trajectories resulted from Task 1, and the tests carried out in Task2, the main conclusions are that after the feedback from ASTRIUM to/from IST, no collisions were detected in all trajectories of the TCS from the lift to all VV ports in levels B1, L1 and L2 of TB and HCB. Exceptions are identified in the next two bullets.
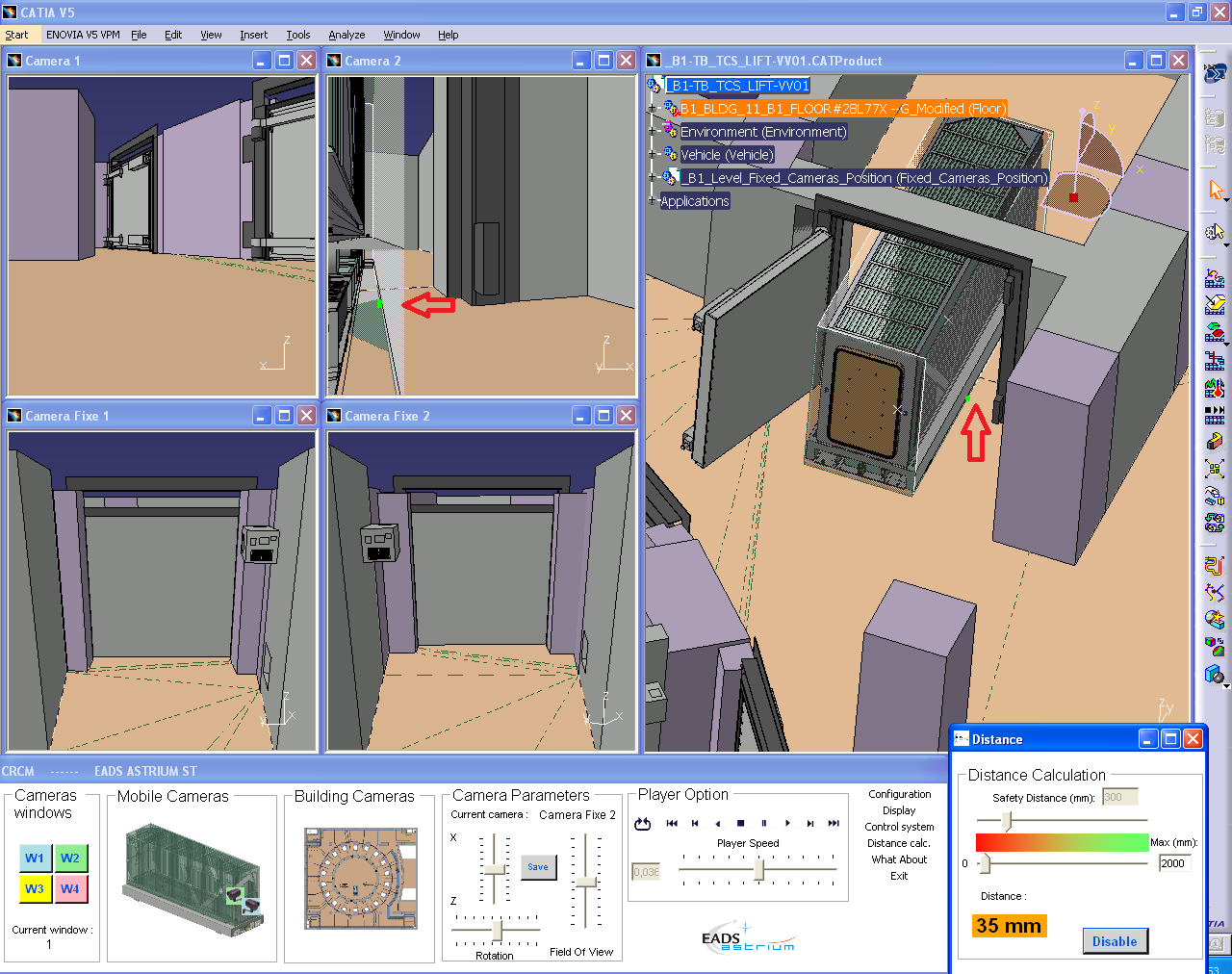
·With the extensive tests carried out ASTRIUM and IST identified a set of problems:
*Some potentials clashes of TCS with VV port and lift doors, as door aperture time sequences are incompatible with the trajectories sequences. As a consequence, one needs to define the proper sequences, which may require:
oStop the TCS during the journey in order to open / close the door,
oSet the duration of opening / closing the door,
oSet the “conditions” or “feedback sensors information” in order to improve the HMI (for example: to get information which will allow the next step of the sequence, e.g., hazards detection, emergency condition, etc).
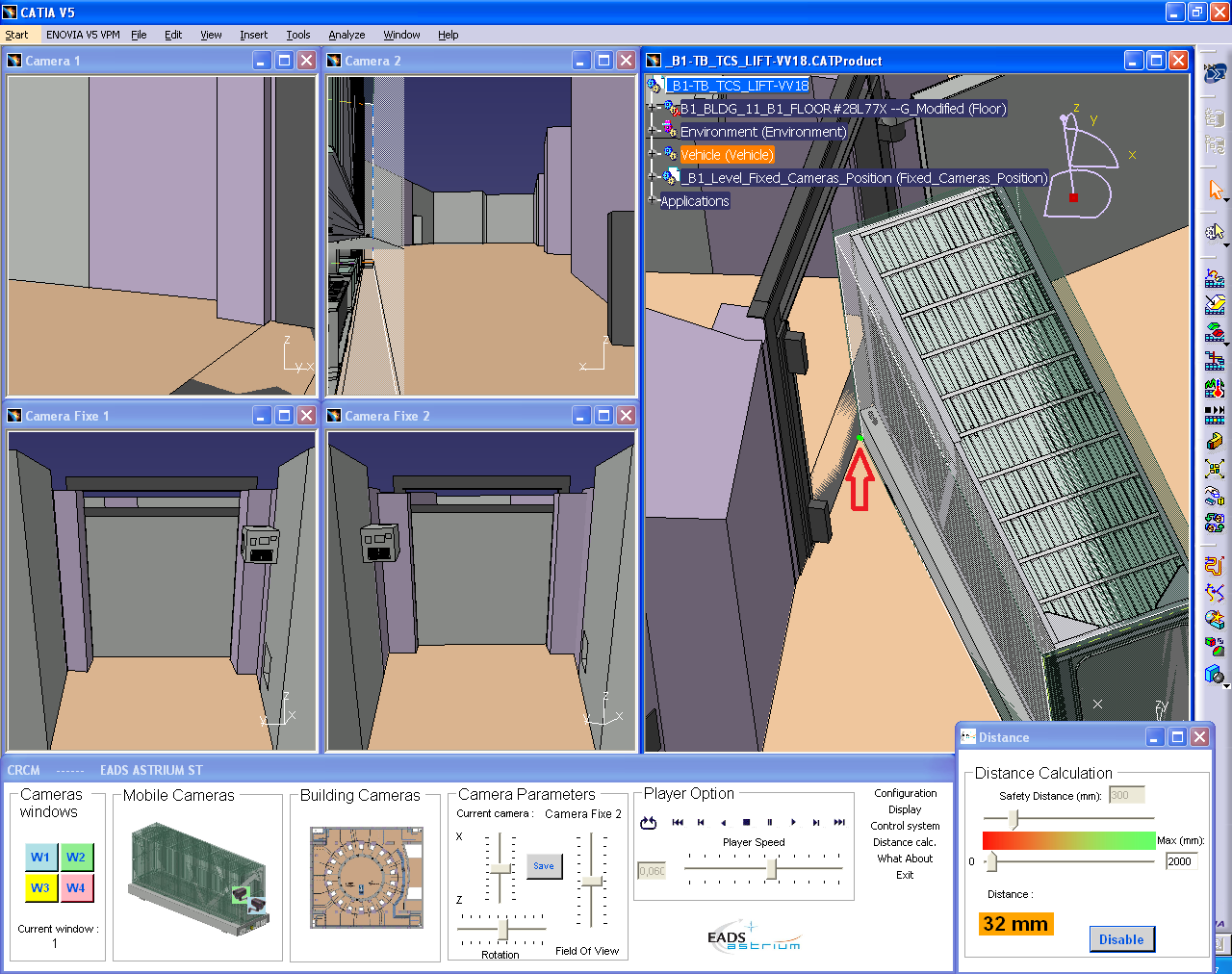
*Some potentials clashes between the Pallet and the ATS during its removal from underneath the pallet in a docking procedure. Indeed, a strong constraint (imposed by the trajectories provided by IST) is to use the same trajectory for the entrance of the TCS in the port and the exit of ATS alone from the port. Moreover, in the port, the trajectory must be a straight line in order to avoid clashes between the ATS and the pallet (input for the optimized trajectories definition).
- The ability for assembling and docking simulation, which provided relevant information for Task 4.
- The definition of a communication protocol for trajectories exchange that resulted from the necessity to establishthe connection between the output of Task 1 and input of Task2.
Task 3 main results
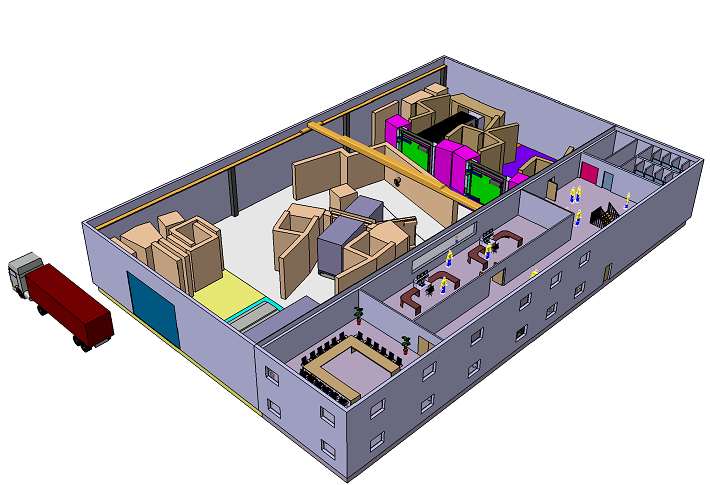
The main results of Task 3 were the definition and specification of a suitable Test Facility (TF), in terms of space/geometry characteristics and requirements, structure of the fixed and movable elements within the facility building, and hardware and software requirements. The TF and the equipment/components to be installed should be versatile, flexible and adaptable in such a way that they can accommodate experiments that reproduce as closely as possible different situations that are predicted to occur during the operation of the ATS/TCS in the final ITER operation and even in situations that cannot be predicted beforehand. The results of the experiments in the TF may lead to the introduction of changes on the ATS/TCS design and its interfaces and/or the buildings. In a later stage, during ITER construction and afterwards, the TF may also serve as an environment mock-up used for training the RH ITER operators that will have to deal with TCS/ATS.
Results were obtained along the following lines of work:
- What to test: the TF must be able to test all the possible RH operations in TB and HCB, in particular to test
- Test different path topologies in nominal operations of TB, including the parking and special maneuvers, path following and velocity control, synchronization between path following and opening/closing doors,
- Rescue and recover operations,
- Scenario feasibility, mainly the floor conditions (gaps, seals, inclinations, irregularities), reliability of communication system,
- Manual and semi-automatic operations by viewing systems, localization system and coordination between virtual and reality system.
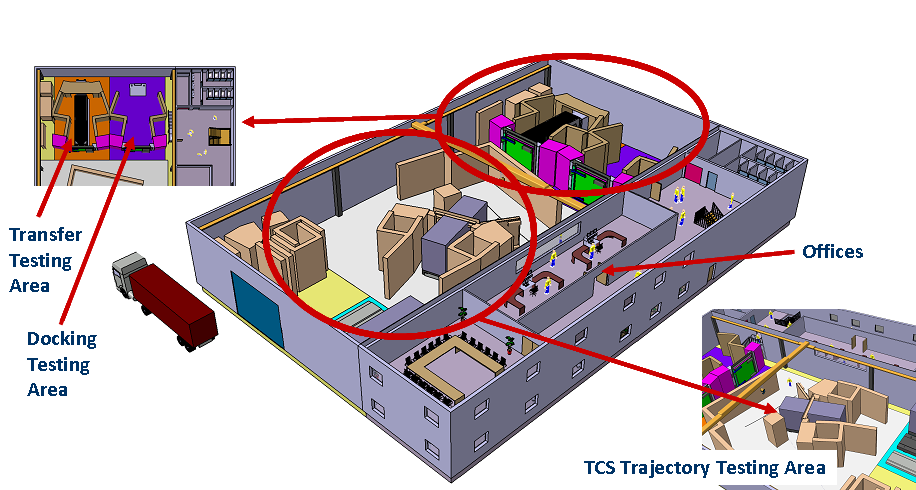
- Building requirements: It is proposed a TF for reproducing only the most relevant parts of the trajectories. A proposed TF is presented in Section 7.4.3 and is illustrated in Figure 2. The dimensions and layout of the TF are discussed to support all the entrances of all VV port cells. In addition it is included the structural aspects of the buildings, mainly the fixed and movable structures.
- Equipment requirements: specific equipment is required for testing the RH operations inside the TF. The principal component is the ATS prototype, but additional equipment is also required, as pallet and casks, in a prototype model or as dummy. In addition, other equipment is required to simulate the scenario or other machines, as a crane to carry on the heavy loads. Table 1 summarizes the type of (large) Equipment required in the TF, which is discussed with more detail in Section 7.5.
- How to test an entire mission: given the selected approach for reproducing the topologies of the optimized trajectories and only part of the scenario, it is necessary some consecutive tests to reproduce an entire mission. This document describes how to test an entire mission, describing the consecutive steps of equipment placement to simulate the entire scenario layout. Some examples are presented to understand how to test an entire mission.
| # | Equipment |
| A | ATS prototype with the entire air-cushion system, connectors, motor engines, etc. |
| B | Second ATS for rescue and recover missions. This ATS only requires the relevant parts for moving and for rescue and recover missions. |
| C | Pallet prototype with all the required connections for docking with port plugs, docking ports and the assembling parts of ATS |
| D | Cask envelope prototype, which corresponds to the entire Docking Testing Area, as depicted in Figure 380. |
| E | Pallet dummy only to test assembling parts with the ATS and a cask envelope dummy. Docking parts are not required. |
| F | Cask envelope dummy to simulate and envelope and load (the weight is adjusted according to the mission for testing). |
| G | Mockups to reproduce a scenario layout. Each scenario requires a different set of mockups. Therefore, it is not possible to reproduce two scenarios simultaneously. |
| H | Entire VV port cell reproduction, which corresponds to the Transfer Testing Area, as depicted in Figure 380. |
Table 1 – Equipment required in the TF.
Task 4 main results
·A critical review of the existent literature, with the identification of the updated or outdated design solutions, mainly for the ATS, but also for some issues on the pallet and the cask envelope.
·Discussion of aspects of dimensions, weights and payloads of ATS and TCS. A set of open issues was raised, in particular the symmetry of the ATS, the extrusion on the cask envelope due to the front and rear double door and the connecting pins that are not considered in the trajectory generation.
·Discussion on some TCS components, in particular those related with the pallet feet.
·Review on the interfaces between the pallet and the buildings, (through the service connector), and between the pallet and the cask envelope. Discussion on the advantages/disadvantages of having a physical connection between the ATS and the pallet. Inconsistencies on the models of the service connector were identified.
·Review of methods for indoor navigation/localization of mobile vehicles which could be potential candidates for the current ITER RH reference design of the TCS/ATS navigation system;
·Discussion on TCS/ATS functional requirements, in particular those relared with the docking procedures, the motion of the ATS when entering underneath the pallet and the obstacle detection and anti-collision systems.
·Web review on air-cushion and rad hard viewing systems.
Publications
- Sensor Network and Localization methods for a mobile robot.
João Ferreira.
MSc Thesis, December 2010, Instituto Superior Técnico, Portugal. - The Remote Handling Systems for ITER.
I. Ribeiro, C. Damiani, A. Tesini, S. Kakudate, M. Siuko, C. Neri.
26th Symposium on Fusion Technology, Porto - Portugal, 27 September - 1 October 2010. - Optimized Trajectories of the Transfer Cask System in ITER.
Filipe Valente, Alberto Vale, Daniel Fonte, Isabel Ribeiro.- 26th Symposium on Fusion Technology, Porto - Portugal, 27 September - 1 October 2010
- Fusion Engineering and Design (available soon)
- Optimizing range finder sensor network coverage in Indoor Environment.
J. Ferreira, A. Vale, R. Ventura.
7th Symposium on Intelligent Autonomous Vehicles, Italy, September 2010. - A motion planning methodology for rhombic-like vehicles for ITER remote handling operations.
D. Fonte, F. Valente, A. Vale, I. Ribeiro.
7th Symposium on Intelligent Autonomous Vehicles, Italy, September 2010. - ITER Transfer Cask System: status of design, issues and future development.
C. González, C. Damiani, J-P Friconneau, A. Tesini, I. Ribeiro, A. Vale.- Proceedings of 9th Int. Symposium on Fusion Nuclear Technology, China, October 2009
- Fusion Engineering and Design, In Press, Corrected Proof, Available online 13 October 2010, ISSN 0920-3796, DOI: 10.1016/j.fusengdes.2010.09.010
Images
- Was this page helpful?
- Tag page (Edit tags)
- What links here
Files 21

| Images 21 | ||
|---|---|---|
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |
 |  |  |